Robosapien Connections Table
This page has moved, click here to be redirected.
<[ Dissection Photos ] - [ LED Mod ]>
| Label | Side / Location | Connects to |
| M1 | Left | Elbow motor (and opens gripper) |
| M2 | Left | Shoulder motor |
| M3 | Right | Elbow motor (and opens gripper) |
| M4 | Right | Shoulder motor |
| M5 | Tilt body motor | |
| M6 | Left | Leg/Hip motor |
| M7 | Right | Leg/Hip motor |
| P1.1 | Left Arm | Finger switch |
| P1.2 | Left Arm | Elbow position switch |
| P1.3 | Left Shoulder | Position switch |
| P1.4 | Right Arm | Finger switch |
| P1.5 | Right Arm | Elbow position switch |
| P1.6 | Right Shoulder | Position switch |
| P2.0 | Left Eye | LED (-) |
| P2.1 | Left Eye | LED (-) |
| P2.2 | Left Eye | LED (-) |
| P2.3 | Right Eye | LED (-) |
| P2.4 | Right Eye | LED (-) |
| P2.5 | Right Eye | LED (-) |
| Vcc | Common Vcc for all eye LEDs | |
| P2.6 | Left Arm | LED (-) |
| P2.7 | Right Arm | LED (-) |
| SPK1 & SPK2 | Speaker on back | |
| VDD-IN | Batteries in feet (caution: fluctuates wildly) | |
| GND | Common Ground | |
| IR-OUT | IR receiver in head | Active low signals, 1200bps |
| Vcc | Regulated 3.6v (100mA but don't overload it) | |
| Vre | ? |
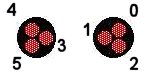
The connection details for the LEDs in Robosapiens eyes.


